2021-10-31 03:41:28 +00:00
|
|
|
|
# scan context
|
2021-10-19 00:52:07 +00:00
|
|
|
|
|
2021-10-31 03:41:28 +00:00
|
|
|
|
# Scan Context: Egocentric Spatial Descriptor for Place Recognition within 3D Point Cloud Map
|
2021-10-19 00:52:12 +00:00
|
|
|
|
|
2021-10-31 03:41:28 +00:00
|
|
|
|
**2018 IROS Giseop Kim and Ayoung Kim**
|
2021-10-19 00:52:12 +00:00
|
|
|
|
|
2021-10-31 03:41:28 +00:00
|
|
|
|
## Background
|
2021-10-19 00:52:12 +00:00
|
|
|
|
|
2021-10-31 03:41:28 +00:00
|
|
|
|
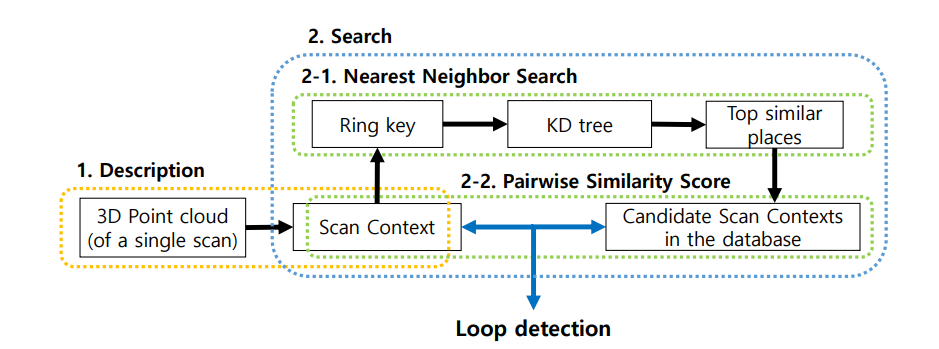
- 回环检测(场景识别)=场景描述+搜索
|
|
|
|
|
|
- 3D点云缺乏色彩信息,纹理信息等,无法提取出传统的图像所特有的特征(ORB,SIFT等)
|
|
|
|
|
|
- 如果不对点云数据进行预处理的话,就只能进行几何匹配,消耗较高
|
2021-10-19 00:52:12 +00:00
|
|
|
|
|
2021-10-31 03:41:28 +00:00
|
|
|
|
## challenge
|
2021-10-19 00:52:12 +00:00
|
|
|
|
|
2021-10-31 03:41:28 +00:00
|
|
|
|
- 降维的形式,尽可能多的保留深度信息
|
|
|
|
|
|
- 描述符的编码
|
|
|
|
|
|
- 相似度打分
|
2021-10-19 00:52:12 +00:00
|
|
|
|
|
2021-10-31 03:41:28 +00:00
|
|
|
|
## Framework
|
2021-10-19 00:52:12 +00:00
|
|
|
|
|
2021-10-31 03:41:28 +00:00
|
|
|
|
|
2021-10-19 00:52:12 +00:00
|
|
|
|
|
2021-10-31 03:41:28 +00:00
|
|
|
|
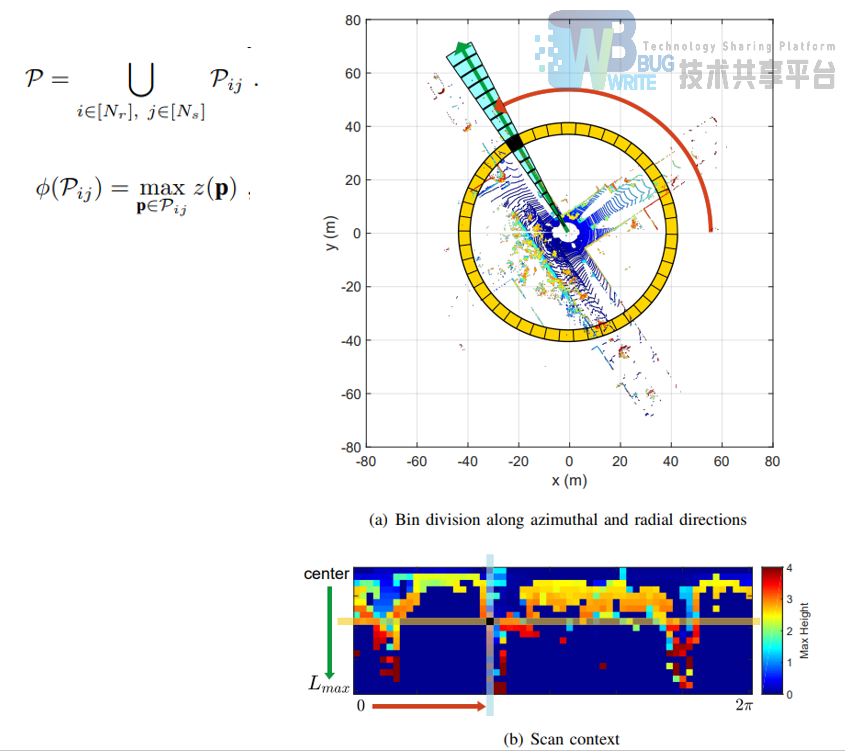
## scan-context
|
2021-10-19 00:52:12 +00:00
|
|
|
|
|
|
|
|
|
|
|
2021-10-31 03:41:28 +00:00
|
|
|
|
将点云分为环形的一块一块,每一块的数值就是这一块点云海拔最高值。这样就实现了降维。
|
|
|
|
|
|
|
2021-10-19 00:52:12 +00:00
|
|
|
|
|
2021-10-31 03:41:28 +00:00
|
|
|
|
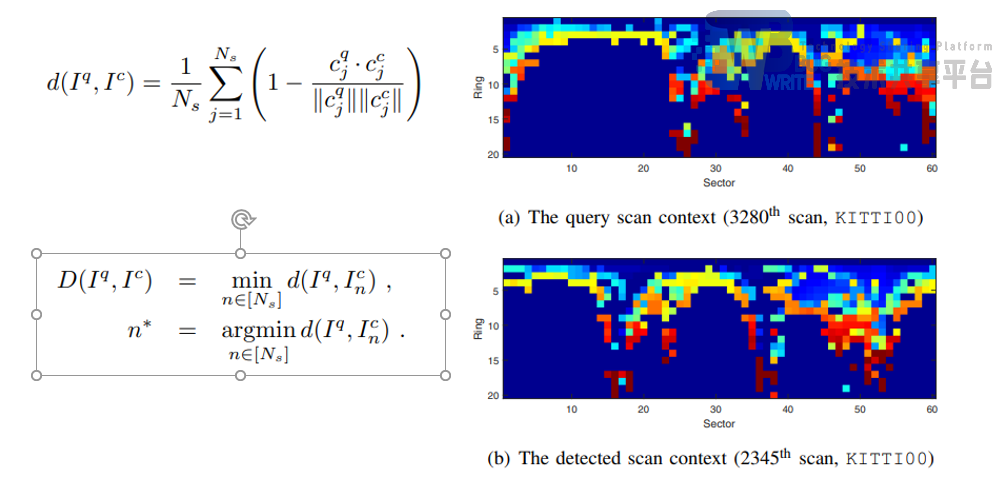
## Similarity Score between Scan Contexts
|
2021-10-19 00:52:12 +00:00
|
|
|
|
|
2021-10-31 03:41:28 +00:00
|
|
|
|
由于雷达视角的不同,即当雷达在同一地点纯转动了一定角度之后,列向量向量值不变,但是会出现偏移;行向量的行为是向量中元素的顺序会发生改变,但是行向量不会发生偏移。采用列向比较。
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
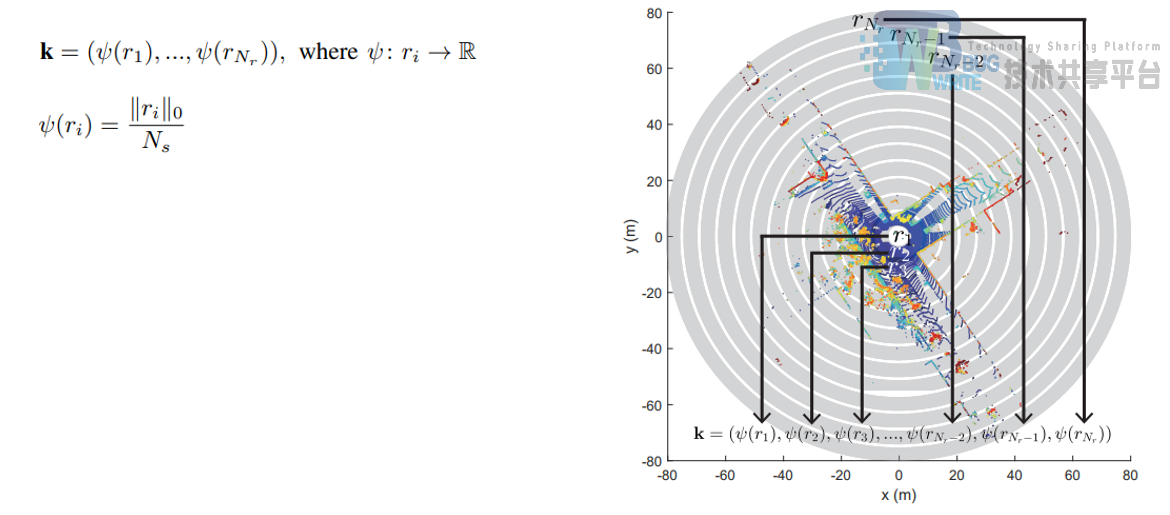
## Two-phase Search Algorithm
|
|
|
|
|
|
|
|
|
|
|
|
- 利用ring key 构造KD—Tree后最近邻检索
|
|
|
|
|
|
|
|
|
|
|
|
- 相似度评分
|
|
|
|
|
|
|
|
|
|
|
|
- 找到闭环对应帧后使用ICP
|